- Каталог
- Измерители-регуляторы
- Приборы контроля и управления
- Программируемые реле
- Программируемые логические контроллеры
- Сенсорные панельные контроллеры
- Панели оператора
- Модули ввода/вывода
- Устройства связи
- Приводная техника
- Блоки питания и устройства коммутации
- Датчики
- Программное обеспечение
- Архив продукции
- Измерители-регуляторы
- Приборы контроля и управления
- Программируемые реле
- Программируемые логические контроллеры
- Сенсорные панельные контроллеры
- Панели оператора
- Модули ввода/вывода
- Устройства связи
- Приводная техника
- Блоки питания и устройства коммутации
- Датчики
- Программное обеспечение
- Электротехническое оборудование Meyertec
- Электротехническое оборудование Meyertec
- О компании
- OwenCloud
- Отраслевые решения
- Контрактное производство
- Электротехническая лаборатория
- Партнеры
- Сертифицированные системные интеграторы
- ФЛП Знайдюк В. Г.
- ФЛП Чикишев П. С.
- Компания «Интеллектуальные технологические решения»
- ЧП «Терфер»
- НПФ «АНТ Электроникс»
- ООО "ТПК "Теплотерм"
- ООО "РАЙЗ ИНЖИНИРИНГ"
- ООО «Электротехмаш»
- ООО «Технологии Энергосистем Украины»
- Днепропетровский инженерно-технический центр «Контакт»
- ООО НПП «Центр Электромеханической Диагностики»
- «ПромАвтоматика Винница»
- Дилеры
- Сертифицированные системные интеграторы
- Поддержка
- Каталог
- Прайс-лист
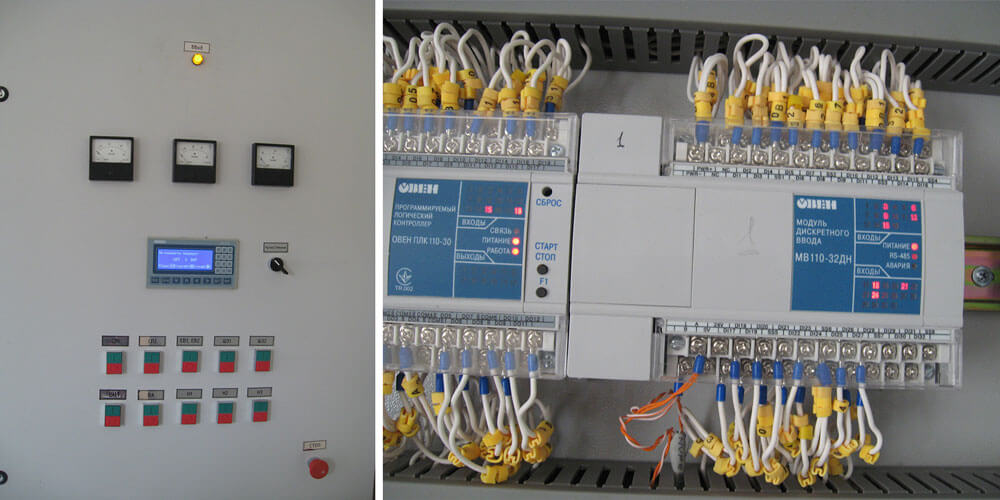
Шкаф управления технологическим оборудованием транспортных маршрутов элеватора
 Описание проекта
Описание проекта
Автоматизированная система (САУ) предназначена для управления электроприводами технологического оборудования транспортных маршрутов элеватора.
Цели создания САУ
Внедрение системы было направлено на реализацию дистанционных (от шкафа управления) режимов работы: «Ручной Режим» (РР) и «Автоматизированный Режим» (АР) со следующими возможностями:
- Реализация в РР пуска/останова технологического оборудования как единицы.
- Реализация в РР установки перекидных клапанов и выгрузных станций в целевое положение.
- Реализация в АР штатного последовательного пуска/останова технологического оборудования в составе выбранного транспортного маршрута.
- Реализация в АР работы аспирации за 10-15 минут до запуска и 10-15 минут после останова технологического оборудования в транспортном маршруте, содержащем сепаратор.
- Реализация защитных блокировок для единицы оборудования маршрута в целом в РР и АР соответственно.
- Реализация корректного останова технологического оборудования в составе транспортного маршрута в случае аварийных ситуаций в АР (под «корректным» следует подразумевать немедленный останов оборудования до аварийного и последовательный останов последующего оборудования с возможностью ссыпки зерна).
- Реализация в АР режиме звукового оповещения (кратковременное включение звонка/сирены на промышленной площадке) перед запуском транспортного маршрута на время 10-15 с.

Реализацию проекта осуществили с помощью следующего оборудования:
- Программируемых логических контроллеров
- Модулей дискретного ввода
- Модулей дискретного вывода
- Панели оператора
Внедрение системы позволило решить следующие задачи:
- Обеспечение выбора режима работы: «Ручной Режим» либо «Автоматизированный Режим».
- Обеспечение управления пуском/остановом выбранным технологическим оборудованием в РР, а именно:
- электровибраторами аспирационной установки (ЭВ1, ЭВ2);
- шлюзовыми затворами (ШЗ1, ШЗ2).
- Обеспечение позиционирования (положение открыто/положение закрыто) выбранного технологического оборудования в РР, а именно:
- промежуточной выгрузной станции (Т1.1);
- реечных задвижек (ЗРЕ1-ЗРЕ7).
- Обеспечение позиционирования (положение 1 / положение 2) выбранного технологического оборудования в РР, а именно перекидных клапанов (КП2-КП10, КП12-КП18).
- Обеспечение пуска/останова совокупности оборудования в составе выбранного транспортного маршрута в АР.
- Обеспечение технологических защит и блокировок работы оборудования, а именно:
- для норий:
- подпор (сигнализация оператору);
- сход ленты рабочей ветви (останов нории, сигнализация оператору);
- сход ленты обратной ветви (останов нории, сигнализация оператору);
- обрыв ленты (останов нории, сигнализация оператору);
- отсутствие обратной связи от контактора (останов нории, сигнализация оператору);
- для конвейеров:
- подпор (останов конвейера, сигнализация оператору);
- скорость и обрыв цепи/ленты (останов конвейера, сигнализация оператору);
- отсутствие обратной связи от контактора (останов конвейера, сигнализация оператору);
- для сепараторов:
- отсутствие обратной связи от контактора (останов сепаратора, сигнализация оператору);
- для вентилятора аспирации:
- отсутствие обратной связи от контактора (сигнализация оператору);
- для вентилятора аэрации:
- для перекидных клапанов, реечных задвижек:положение не соответствует целевому (сигнализация оператору);
- отсутствие обратной связи от контакторов (сигнализация оператору);
- для промежуточной выгрузной станции:
- положение не соответствует целевому (сигнализация оператору);
- отсутствие обратной связи от контакторов (сигнализация оператору).
- для норий:
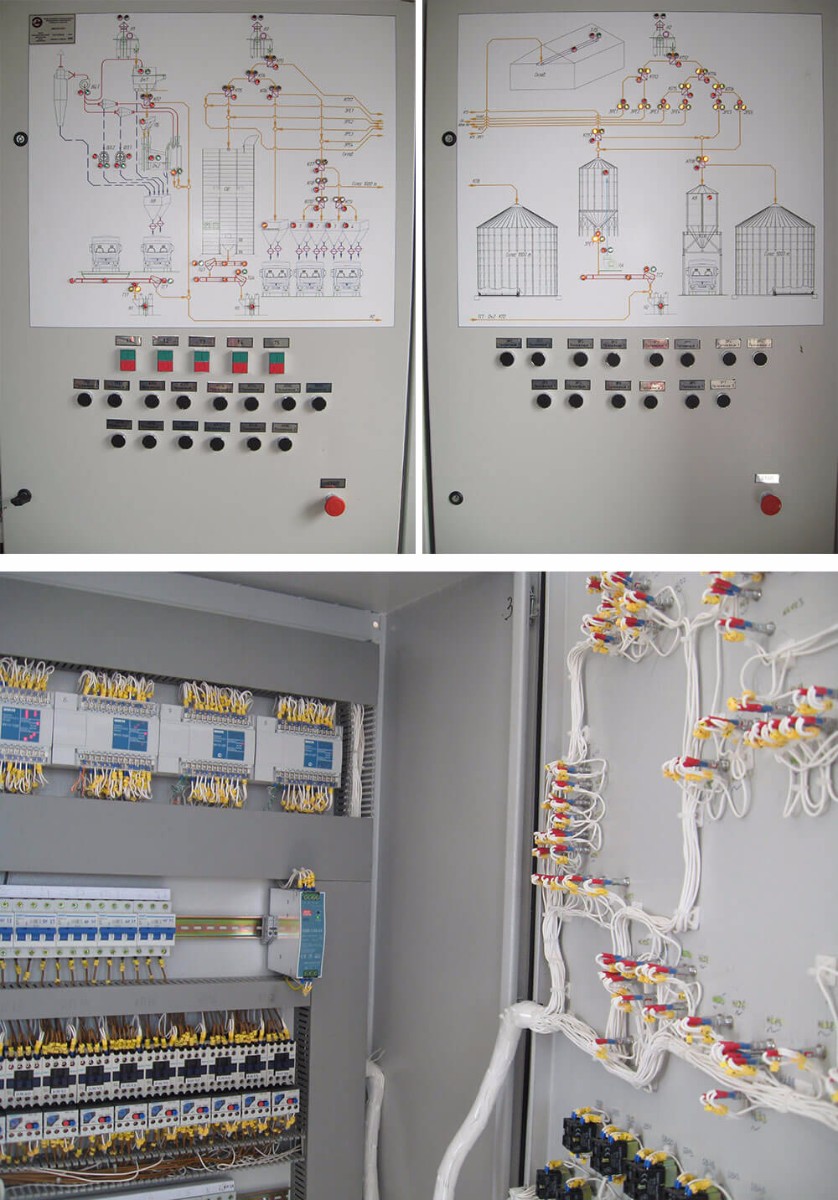
- Обеспечение индикации о состоянии оборудования на мнемосхеме шкафа («работа», «авария», «остановлено»).
- Обеспечение индикации о достижении предельных уровней Силоса, Сушилки, Автоперспективы, Бункеров зерна 1-4, Промежуточного бункера ПБ на мнемосхеме шкафа.
- Обеспечение Аварийного останова всего оборудования одновременно, задающегося с панели шкафа управления.
- Повышение безопасности функционирования технологического оборудования, достигаемое посредством предоставления дополнительной оперативной информации состояния оборудования, сигнализации и индикации аварийных ситуаций.
Иерархия и подсистемы САУ
В состав системы сходят следующие подсистемы:
- «Контроль состояния оборудования», предназначенная для отслеживания текущего состояния датчиков и исполнительных механизмов и индикации состояния оборудования с выполнением сигнализации аварийных ситуаций.
- «Обеспечение безопасности функционирования оборудования», предназначенная для автоматической отработки алгоритмов отключения оборудования при аварийных ситуациях по одному или совокупности контролируемых параметров.
- «Запуск, функционирование и остановка оборудования» обеспечивает автоматизированный запуск и остановку оборудования по команде оператора, отображения текущего состояния оборудования, а также автоматическую отработку аварийных ситуаций.
Комплекс технических средств (КТС) автоматизированной системы включает в себя два уровня иерархии. Нижний уровень реализуется при помощи датчиков и обеспечивает преобразование воздействий физических величин в электрические аналоговые или дискретные сигналы.
Средний уровень реализуется при помощи программируемого логического контроллера (ПЛК). На этом уровне реализуются следующие функции:
- сбор и первичная обработка сигналов от датчиков;
- формирование и выдача команд на исполнительные механизмы;
- автоматическая отработка алгоритмов и сигналов отключения оборудования при аварийных ситуациях;
- индикация состояния оборудования.
Режимы функционирования САУ
Реализованы ручной и автоматизированный дистанционный режимы работы, а также обеспечена индикация состояния технологического оборудования элеватора.
В ручном дистанционном режиме выполняются следующие действия:
- считывание информации с датчиков и отображение информации о состоянии оборудования на лицевой панели шкафа управления;
- обеспечение возможности установки оборудования, регулирующего потоки, в необходимое положение;
- обеспечение разрешения запуска оборудования оператором от шкафа управления с сохранением блокировок;
- выполнение запуска и штатного останова оборудования;
- выполнение останова оборудования при аварийной ситуации;
- подача звуковой и/или световой сигнализации согласно требованиям технологического процесса.
В автоматизированном дистанционном режиме выполняются следующие действия:
- считывание информации с датчиков и отображение информации о состоянии оборудования на лицевой панели ШУ;
- обеспечение разрешения запуска выбранного маршрута от шкафа управления оператором с сохранением блокировок, а также блокировок от предыдущего механизма, следующего механизма;
- выполнение запуска и штатного останова оборудования;
- выполнение останова оборудования при аварийной ситуации;
- подача звуковой и/или световой сигнализации согласно требованиям технологического процесса.
Диагностирование системы
В ручном режиме САУ выполняет проверку возможности запуска единицы оборудования, в автоматизированном – возможность запуска единицы оборудования и выбранного транспортного маршрута в целом.
Система сохраняет работоспособность и приходит в исходное состояние после сбоев в электроснабжении. Исходным состоянием является готовность системы к работе, при этом каждый отдельный механизм находится в стопе.
Список использованного в проекте оборудования АКУТЕК
- ПЛК110-24.30.Р-М – 2 шт.
- МВ110-24.32ДН – 14 шт.
- МУ110-24.32Р – 10 шт.
- ИП320 – 1 шт.
О системном интеграторе/проектной организации:
- ООО НПП «Центр Электромеханической Диагностики»
- тел./факс +38056 -370-99-49
- E-mail: cedgroup@ukr.net
- Сайт: www.ced.dp.ua
